
Low earth orbit satellite navigation technology for Ka frequency band
-
摘要:
随着技术的进步和新需求的出现,GNSS系统在体制层面的实时高精度定位的瓶颈日益显现,目前基于GNSS的高精度增强技术依旧不能突破体制本身的限制,1 min的收敛时间和10 m的定位精度已达到上限。随着近年来大规模低轨卫星星座的兴起,用于低轨通信的Ka频段在导航领域展现巨大发展潜力。文章首先针对Ka频段低轨导航系统的技术现状,通过仿真分析了Ka频段在天线增益、码跟踪精度、电离层误差等低轨导航领域的潜在性能优势,并通过链路预算、精度因子计算对Ka频段高精度定位的理论进行验证;其次,综合各种Ka频段定位精度影响因素进行分析计算,得到了Ka频段导航信号用户三维定位精度
0.0475 m的结论;最后,对目前需要Ka频段在导航领域需要解决的三大关键问题进行讨论,并给可能的解决方案。基于Ka频段信号进行导航增强有望突破当前GNSS系统的瓶颈,实现收敛时间达到秒级、定位精度达到厘米级的实时高精度定位,是未来导航系统的发展趋势,可为我国未来低轨导航增强系统发展提供借鉴。-
关键词:
- 低轨卫星导航增强系统 /
- 实时高精度定位 /
- Ka频段
Abstract:With the advancement of technology and the emergence of new needs, the bottleneck of real-time high-precision positioning of GNSS system at the institutional level is becoming increasingly apparent, and the current high-precision enhancement technology based on GNSS still cannot break through the limitations of the system itself, and the convergence time of 1min and the positioning accuracy of 10m have reached the upper limit. With the rise of large-scale LEO satellite constellations in recent years, the Ka-band for LEO communication has shown great potential in the field of navigation. In this paper, aiming at the technical status of Ka-band low-orbit navigation system, the potential performance advantages of Ka-band in the field of low-orbit navigation such as antenna gain, code tracking accuracy, ionospheric error are analyzed through simulation. Secondly, the influencing factors of Ka-band positioning accuracy are analyzed and calculated, and the conclusion of the three-digit positioning accuracy of Ka-band navigation signal users is
0.0475 m. Navigation enhancement based on Ka-band signals is expected to break through the bottleneck of the current GNSS system and achieve real-time high-precision positioning with convergence time of seconds and positioning accuracy of centimeters, which is the development trend of navigation system in the future and provides reference for the development of low-orbit navigation augmentation system in China in the future. -
0. 引言
近年来,随着大规模低轨星座建设热潮以及自动驾驶新型用户需求的出现,以实时高精度定位为主要优势的低轨导航增强逐渐成为导航领域的研究热点,国内外都在积极发展低轨导航增强和技术验证。
美国XONA公司瞄准自动驾驶用户需求,计划建设由300颗卫星组成的低轨星座,以高精度、高安全,高可用作为目标,并计划在L频段和C频段播发导航信号[1]。欧洲ESA提出了LEO-PNT架构,以实现复杂环境下高精度,高可靠性和高鲁棒性的PNT服务,对了基于Ka频段的非地面网络定位进行前瞻[2]。国内未来导航公司计划建设150颗卫星的低轨导航星座“微厘空间”,以高精度和高可靠性为目标,在L1和L5频段播发导航信号[3]。中国电子科技集团启动并发射了“天象一号”A/B双星,设计LePT信号进行双频播发,验证低轨导航增强的关键技术[4 – 5]。武汉大学发射了珞珈一号并开展了基于低轨卫星平台的导航信号增强实验,在轨自主生成双频测距信号向地面播发[6]。
上述高精度定位都是基于载波相位测量的PPP体制,通常采用无电离层组合,因此需要播发双频信号;同时利用低轨卫星运动快,几何构型变化迅速来加快整周模糊度求解,最终目标是实现1 min的收敛时间并达到10 cm精度。
受到体制本身的制约,收敛时间达到1 min已是极限,如何进一步提升高精度定位的实时性成为需要解决的瓶颈。近来低轨卫星星座的快速发展为解决这一问题带来了契机:低轨星座使用的Ku/Ka信号可用带宽高,天线增益高,有效载噪比高,有望实现码基实时高精度。目前国外针对低轨宽带卫星导航已经有了一些初步的研究,但并未涉及实时高精度应用。本文针对低轨卫星星座Ka频段的低轨导航技术开展研究,对当前的卫星导航高精度定位现状和瓶颈进行分析,在此基础上研究了Ka频段用于卫星导航的优势,对Ka频段的潜在性能进行了分析,最后进行了总结。
1. GNSS系统的高精度定位瓶颈
自GPS于上世纪80年代投入使用以来,全球卫星定位系统已走过了近30年的历程。经过不断的发展和完善,现今,全球卫星导航系统已经形成了美国GPS、俄罗斯GLONASS、中国北斗、欧洲Galileo等四大系统并存的格局。这些系统不仅覆盖范围广,而且定位精度也得到了显著提升,普遍优于10 m[7],为用户提供了前所未有的定位体验。
然而,随着科技的日新月异和用户需求的不断升级,对于定位精度和收敛时间的要求也在不断提高。传统的L频段信号虽然在导航领域应用广泛,但面对日益复杂的电磁环境和多样化的用户需求,其局限性和不足也日益凸显。当前GNSS(global navigation satellite system,GNSS)系统的核心要素如图1所示,体制本身的局限性导致有意或无意的影响都可能对L频段信号造成严重影响[8 – 11],进而影响到定位系统的稳定性和准确性。
当前,GNSS基本服务是面向开阔环境设计的,信号落地功率约−160 dBW,基本电文信息速率50 bit/s~250 bit/s。如表1所列,列举了目前GNSS使用的三种高精度定位信号,其信息速率大约在500 MHz~
2000 MHz,相较传统信号功率提升不大,甚至略有下降,解调性能和可用性较差,在城市、峡谷等挑战性环境下应用受到极大的限制。表 1 高精度定位信号信息速率与落地功率Table 1. High precision positioning signal information rate and landing power信号 频率/MHz 信息速率/(bit/s) 落地功率/dBW Galileo E6B 1278.75 448 −158.25 QZSS L6D 1278.75 2000 −159.82 BDS B2b 1207.14 500 −160 为了突破GNSS系统本身在高精度定位的瓶颈,国内外学者在低轨高精度增强领域进行了积极的探索,如表2所列,列举了国内外最近在低轨高精度增强领域进行的系统规划和试验星建设情况,可见目前的低轨高精度增强仍基于载波相位测量,需要使用双频进行无电离层组合,利用低轨卫星运动快,几何构型变化迅速加快整周模糊度求解收敛时间,目标是实现1 min收敛达到定位精度10 cm。而信号的功率又受到限制,从体制层面制约了定位精度的进一步提高。
表 2 国内外低轨高精度增强领域进行的系统规划和试验星建设情况Table 2. System planning and experimental satellite construction in the field of high-precision enhancement of low orbit at home and abroad国家 低轨高精度增强
系统/试验星落地功率
/dBW信息速率
/(bit/s)频点/MHz 美国(XONA) Pulsar / / L,C 欧洲(ESA) LEO-PNT / / Ka 中国(未来导航) 微厘空间 −157 1000 L1: 1569 ~1581
L5:1170 ~1182 中国(武汉大学) 珞珈一号 约−130 / H1、H2 中国(电子科技) 天象一号 优于−163 1000 LePT1: 1525.21
LePT2:1298.187 2. Ka频段在导航应用的优势分析
2.1 宽带互联网星座在导航领域的研究现状
随着国内外低轨大规模卫星星座的规划建设的兴起,以OneWeb和Starlink为代表的低轨卫星星座成为学者们探寻导航增强的新对象。研究基于低轨卫星星座在导航领域的性能成为当下的发展趋势。
2016年起,斯坦福大学以OneWeb星座作为研究对象讨论了低轨卫星星座在增强GPS和作为备份的可能性,研究表明OneWeb星座空间信号测距误差约为3.0 m[12 – 14]。
2018年,斯坦福大学又面向OneWeb、Starlink等现有低轨星座计划,从空间段和轨道层面分析利用低轨卫星星座进行独立导航的性能[15]。
2020年,德克萨斯大学提出了一种LEO GNSS的替代融合方法,这种融合低轨全球导航卫星系统在能在的不牺牲任何性能同时消除专用在轨硬件成本。与之前传统GNSS相比,融合低轨GNSS可以在定位精度上提高一个数量级,且在达到几十分米的精度的同时具备更高的载噪比[16]。2021年,加利福尼亚大学提出了一种基于自适应卡尔曼滤波的未知Starlink信号载波相位跟踪算法,实验结果表明, 使用6颗Starlink卫星进行载波相位跟踪可以达到7.7 m的水平定位精度[17]。
可见目前基于大规模低轨卫星星座的研究主要有两个方向,一是采用独立导航的模式,直接使用通信信号,优点是不需要额外的建设成本,但定位精度较差,只能达到米级;二是采用通导融合的方式,优势在于具有更高的载噪比,同时定位精度可以到达几十分米;这两种模式都无法满足目前对实时高精度定位的厘米级需求。
2.2 Ka频段优势分析
Ka频段的与传统GNSS信号相比具有一系列显著的优势。本节将从天线增益、可用带宽和码跟踪精度三个方面,剖析Ka频段的主要优势,并结合仿真数据进行分析。
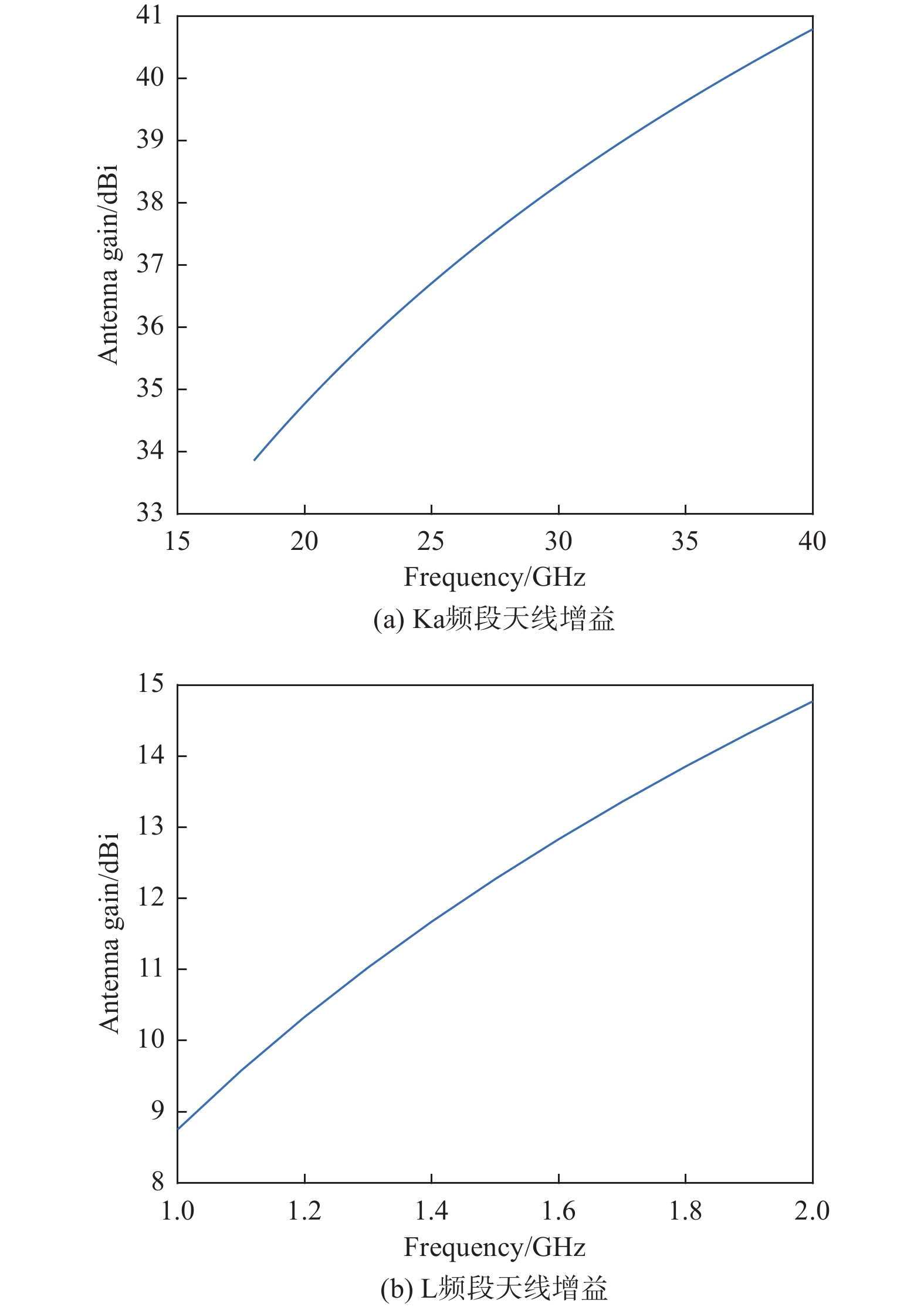
天线增益是衡量信号传输效率的重要指标,它决定了卫星信号在传输过程中的强度和覆盖范围。Ka频段采用点波束播发,接收天线增益高。以抛物面天线为例,在天线口径D均为0.2 m的条件下,依据下式分别绘制了Ka频段和L频段的天线增益曲线,如图2与图3所示。为了便于对比分析,此处以频率代替波长作为自变量绘制增益曲线,如式(1)所列。
![]() 图 2 Ka频段和L频段天线增益对比Figure 2. Comparison of antenna gain between Ka frequency band and L frequency band
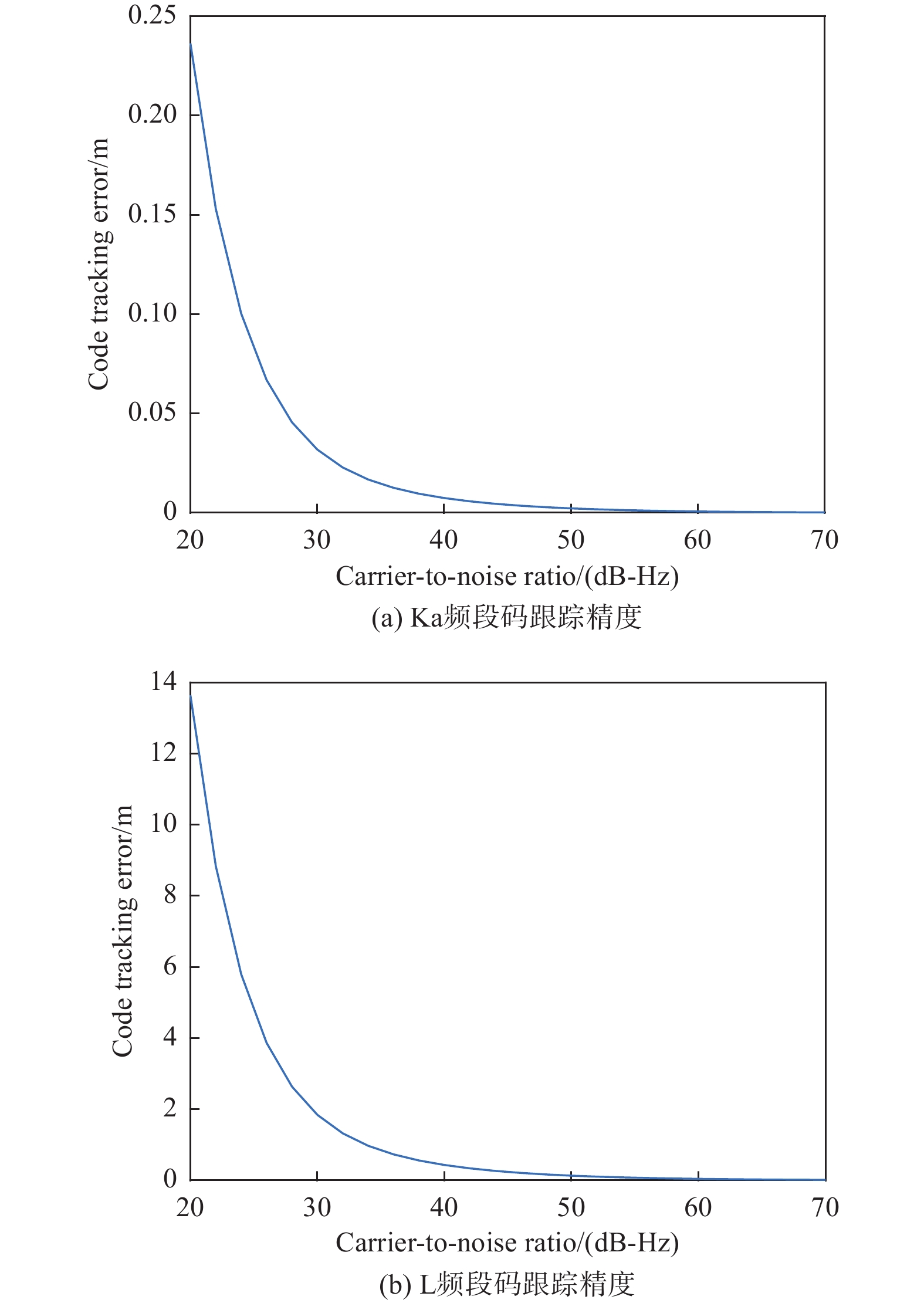
图 2 Ka频段和L频段天线增益对比Figure 2. Comparison of antenna gain between Ka frequency band and L frequency band![]() 图 3 Ka频段和L频段码跟踪精度对比Figure 3. Comparison of codes tracking accuracy between Ka frequency band and L frequency band
图 3 Ka频段和L频段码跟踪精度对比Figure 3. Comparison of codes tracking accuracy between Ka frequency band and L frequency band$$ G(dBi) = 10\lg \left( {4.5{{\left( {\frac{D}{{{\lambda _0}}}} \right)}^2}} \right) $$ (1) 不难发现,Ka频段的天线增益远高于L频段。这意味着Ka频段的等效载噪比远高于传统导航信号,可以减小用户端天线尺寸,降低成本,并且有可能增加导航电文的播发速率,进而实现秒级电文播发与接收。
Ka频段拥有更高的可用带宽。Ka频段的可用带宽在200 MHz以上,远超传统GNSS信号,而且Ka频段频谱资源相对充足,相较于拥挤的L频段有更大的发挥空间,可以避免传统频段的拥挤和饱和。基于Ka频段的大带宽,有望提升码速率,进而提升伪随机码测量性能,实现单历元码基高精度定位。
最后,Ka频段在码跟踪精度方面具有显著优势。在复杂的电磁环境中,信号噪声是一个不可忽视的问题。如图4所示分别绘制了L频段10.23 Mhz码速率和Ka频段200 Mhz码速率条件下BPSK信号的码跟踪精度曲线 ,可见在同等载噪比下,Ka频段的码跟踪精度比L频段高出一个数量级,且载噪比在达到38 dB时,码跟踪精度误差达到0.01 m水平。
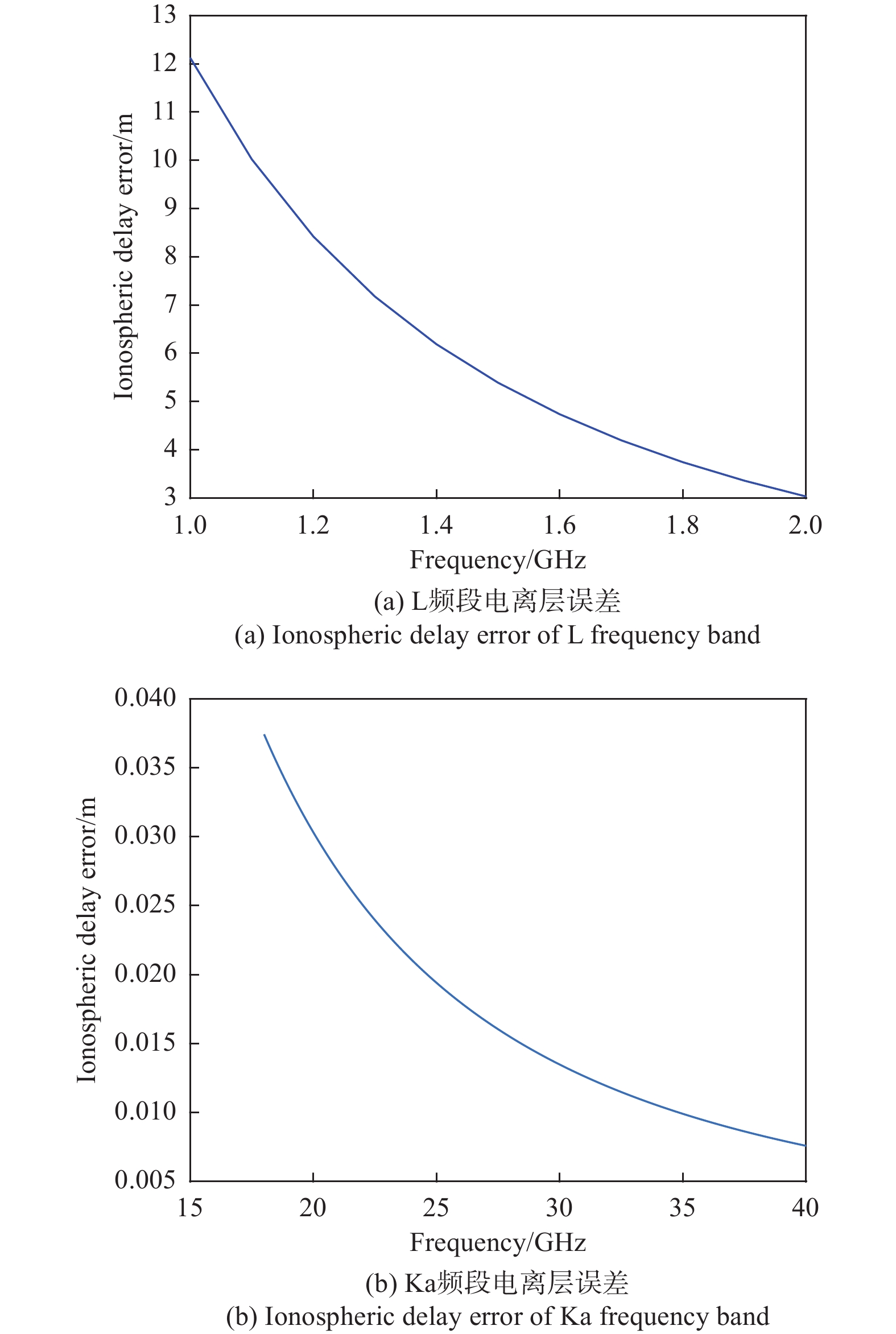
![]() 图 4 Ka频段和L频段电离层误差对比Figure 4. Comparison of ionospheric errors between Ka frequency band and L frequency band
图 4 Ka频段和L频段电离层误差对比Figure 4. Comparison of ionospheric errors between Ka frequency band and L frequency band根据如下电离层延时公式(${\sigma _{{\text{STEC}}}}$=10TECU),分别绘制了L频段和Ka频段的电离层误差曲线,不难发现Ka频段相较传统的L频段受到电离层的影响下降了两个数量级,这意味这Ka频段能够突破传统双频无电离层组合的限制,有实现单频定位的可能。如式(2)所列。
$$ \sigma _{{\text{IONO}}}^2 = {\left( {\frac{{40.3 \times {{10}^{16}}{\text{m}}/{{\text{s}}^2}/{\text{TECU}} \cdot {\sigma _{{\text{STEC}}}}}}{{{f^2}}}} \right)^2} $$ (2) 3. Ka频段在导航领域的潜在性能评估
3.1 Ka导航体制参数
在这一节中,对Ka频段在导航领域的潜在性能进行了评估;在评估中采用200 MHz码速率的扩频Ka信号,中心频率为20.7 GHz,天线口径为0.2 m,仰角为15°,发射功率为13 dBW,轨道高度设定为
1000 km。3.2 链路预算
按照3.1中的Ka导航体制参数对Ka频段信号进行链路预算,结果如表3所列。可见在仅需13 dBW发射功率的前提下就可实现落地功率−138 dBW,相较现有GNSS系统的L频段提升接近20 dB,且与L频段相比能够更容易提升信号落地功率。通过播发高功率Ka频段导航信号,一方面能够实现增强电文的快速播发,缩短精密定位时间;另一方面,可以大幅提升了挑战环境下的可用性。
表 3 Ka频段链路预算Table 3. Link budget of Ka frequency bandKa频段链路预算 中心频率 20.7 GHz 发射功率 13 dBW 轨道高度 1000 km地球半径 6371.393 km空间路径损耗 118.76 dB 仰角 15° 大气损耗 70.2 dB 极化损耗 3.01 dB 信号落地功率 −138.97 dBW 3.3 精度因子及其全球分布
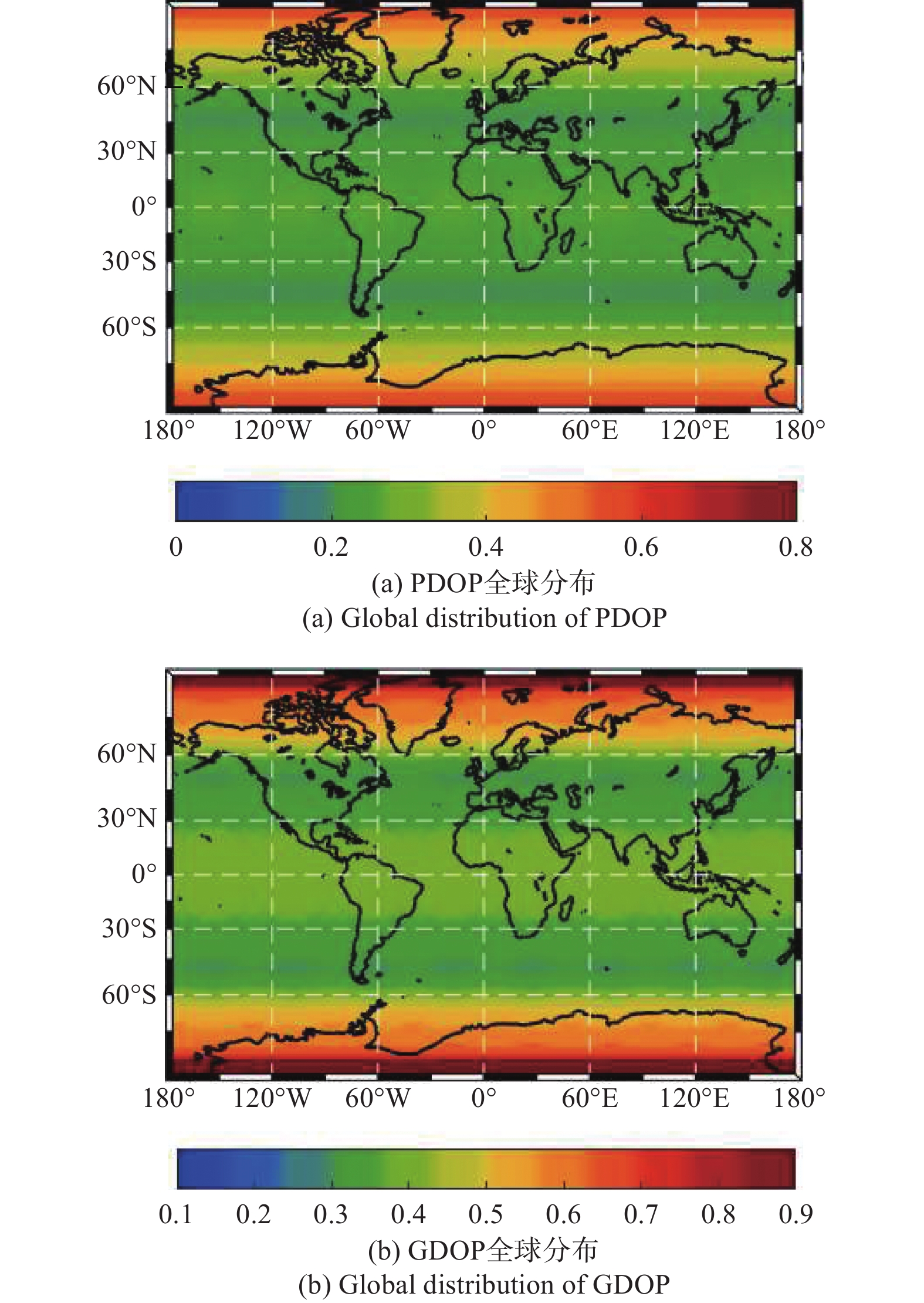
卫星的几何分布对定位的影响可以由精度因子(dilution of Precision,DOP)来反映,DOP值越低,几何图形结构越好。DOP值通常由伪距单点定位观测方程设计矩阵构成的精度因子矩阵计算得到。在这一节中,以Starlink的三个Ka频段Walker卫星星座(共计
3600 颗卫星)作为Ka频段在精度因子层面潜在性能评估的对象,在仰角为15°的情景下,绘制了PDOP和GDOP的全球分布情况,如图5所示。3.4 定位精度表
按照3.1中Ka导航体制参数以及3.2中PDOP结果,参照如式(2)至(6)所示,对Ka频段预计定位精度性能进行计算;
其中$ \sigma\mathit{_{\text{URE}}} $为用户测距误差,$ \sigma\mathit{_{\text{ORB}}} $为轨道误差,$ \sigma\mathit{_{\text{IONO}}} $为电离层延迟误差,$ \sigma\mathit{_{\text{TRO}}} $为对流层延迟误差(${\sigma _{{\text{STEC}}}}$=10TECU), ${\sigma _{{\text{3D}}}}$为用户三维位置误差,各项定位精度影响因素计算结果如表4所列。依据式(3)至(6)最终计算得出用户的三维位置误差约为
0.0475 m,能够满足实时高精度定位的需求。表 4 高精度定位信号信息速率与落地功率Table 4. High precision positioning signal information rate and landing power$$ \sigma _{{{URE}}}^2 = \sigma _{{{ORB}}}^2 + \sigma _{{{IONO}}}^2 + \sigma _{{{TRO}}}^2 + \sigma _{{{RNM}}}^2 $$ (3) $$ \sigma _{{{RNM}}}^2 \geqslant \frac{{3{c^2}{k_{\text{B}}}{T_{{\text{RX}}}}}}{{2{{\text{π}} ^2}{W^2}Pt}} $$ (4) $$ \sigma _{{{TRO}}}^2 = {\sigma _{{{TRO}}({{GPS}})}} \approx {(0.050\;{\mathrm{m}})^2} $$ (5) $$ {\sigma _{3{{D}}}} = PDOP \cdot {\sigma _{{{URE}}}} $$ (6) 4. Ka频段目前需要解决的问题
4.1 高覆盖问题
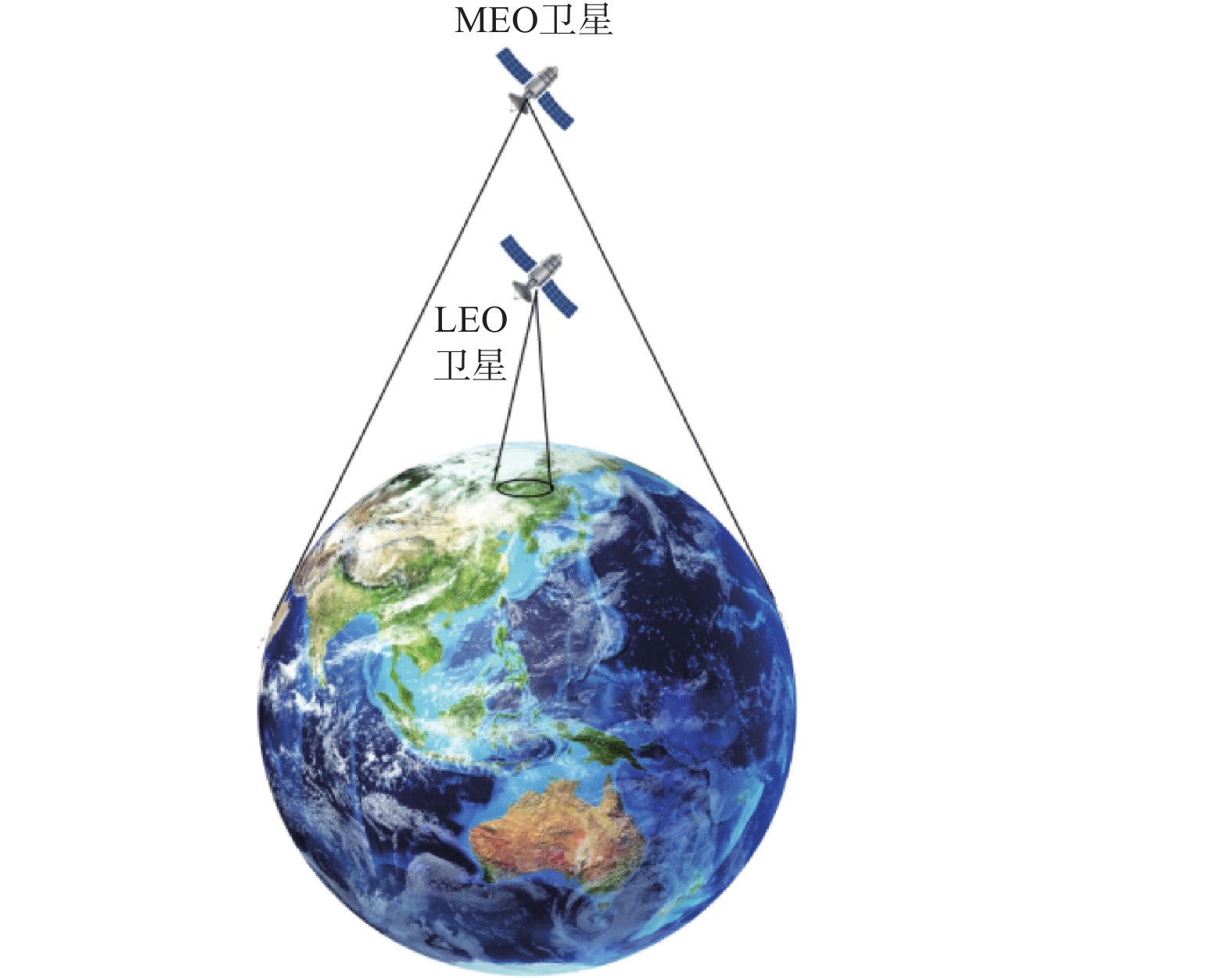
LEO卫星由于其轨道高度较低,运动速度快,几何构型变化迅速,相较于MEO卫星,其覆盖面积要小得多;这使得如何实现高覆盖成为Ka频段在导航应用中所面临的首要问题。
如图6所示,LEO卫星的低轨道导致卫星在地球表面的投影面积较小,而高速运动则使得这种覆盖状态持续的时间非常短暂。此外,由于几何构型的变化迅速,要在特定的地点和时间提供稳定的信号变得异常困难,如图7所示。
![]() 图 6 MEO卫星和LEO卫星覆盖性能差异Figure 6. Differences in coverage performance between MEO and LEO satellites
图 6 MEO卫星和LEO卫星覆盖性能差异Figure 6. Differences in coverage performance between MEO and LEO satellites一个可行的解决方案是利用低轨卫星星座的优势,此类星座通常由数百颗甚至上千颗卫星组成,它们共同工作,形成一个庞大的网络。通过精细的无线资源管理,可以实现在同一时间,不同的卫星指向不同的地点,从而实现等效的全覆盖。
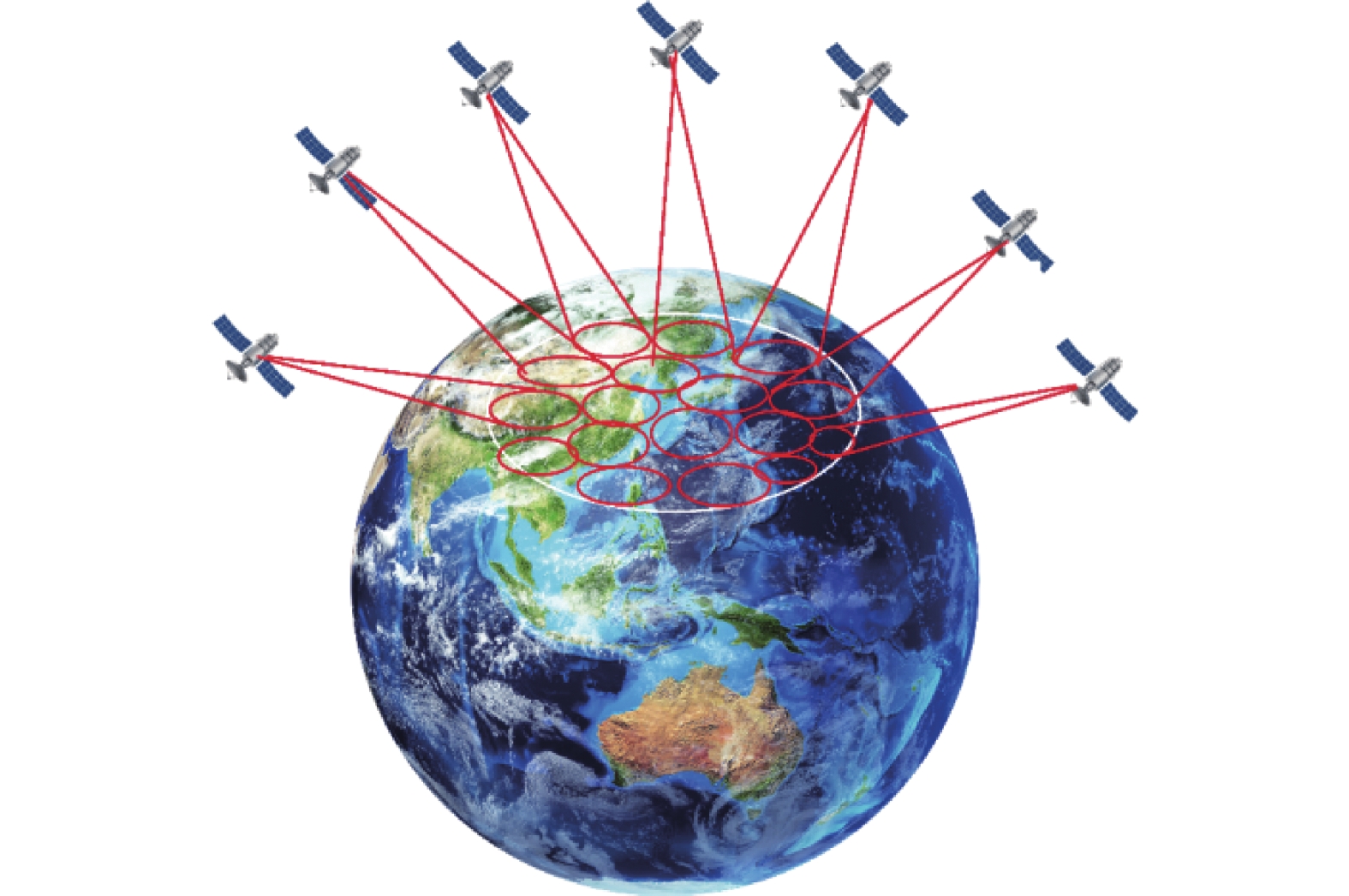
具体到Ka频段,这种频段的点波束具有高增益、窄覆盖、全球任意位置可发的特点。这意味着,尽管某一时刻单位面积内的用户终端数量有限,但可以通过时分跳波束的播发方式,对用户进行动态的时分覆盖;依靠这种快速跳波束的手段,使得白色的大覆盖区域可以由若干个红色的波束小覆盖区域以时分播发的方式进行等效替代。通过若干颗卫星的波束的快速跳变,有望实现等效的覆盖性能,从而达到与传统GNSS相当的覆盖效果,解决大覆盖问题。
4.2 信号体制
在上一章节中探讨了Ka频段在导航领域的潜在性能评估,但是有一个重要方面没有考虑,即Ka频段本身多用于通信信号,因此在播发导航电文时,需要考虑采用何种信号体制。
首先,如果考虑在通信信号的时隙中播发导航电文,我们必须面对一个现实挑战:时隙通常很短。这种短暂的播发时间可能会对测量精度造成显著影响。这是因为接收设备需要在有限的时间内准确地捕捉和解码电文信息,这对设备的性能和稳定性提出了很高的要求。此外,由于时隙短暂,可能会导致电文信息的传输不完整或出现误差,进一步影响导航系统的准确性。
另一方面,如果采取独占频率资源的播发方式,虽然可以避免与通信信号的冲突,但也会不可避免地影响到测量精度。
为了解决这个问题,可以考虑采用宽带扩频脉冲的形式进行播发。宽带扩频脉冲是一种通过扩频技术将信号扩展到更宽的频带中的方法。这种技术可以有效地提高信号的稳健性,减少信号衰减,从而确保导航电文能够准确、稳定地传输到接收设备。通过宽带扩频脉冲的形式播发导航电文,不仅可以避免与通信信号的冲突,还能在一定程度上提高测量精度。这是因为扩频技术能够增强信号的鲁棒性,使其在复杂的电磁环境中仍能保持稳定。此外,宽带扩频脉冲还可以提高信号的传输效率,使得导航电文能够在更短的时间内完成传输,从而减少因时隙短暂而导致的测量误差。
4.3 信号接收
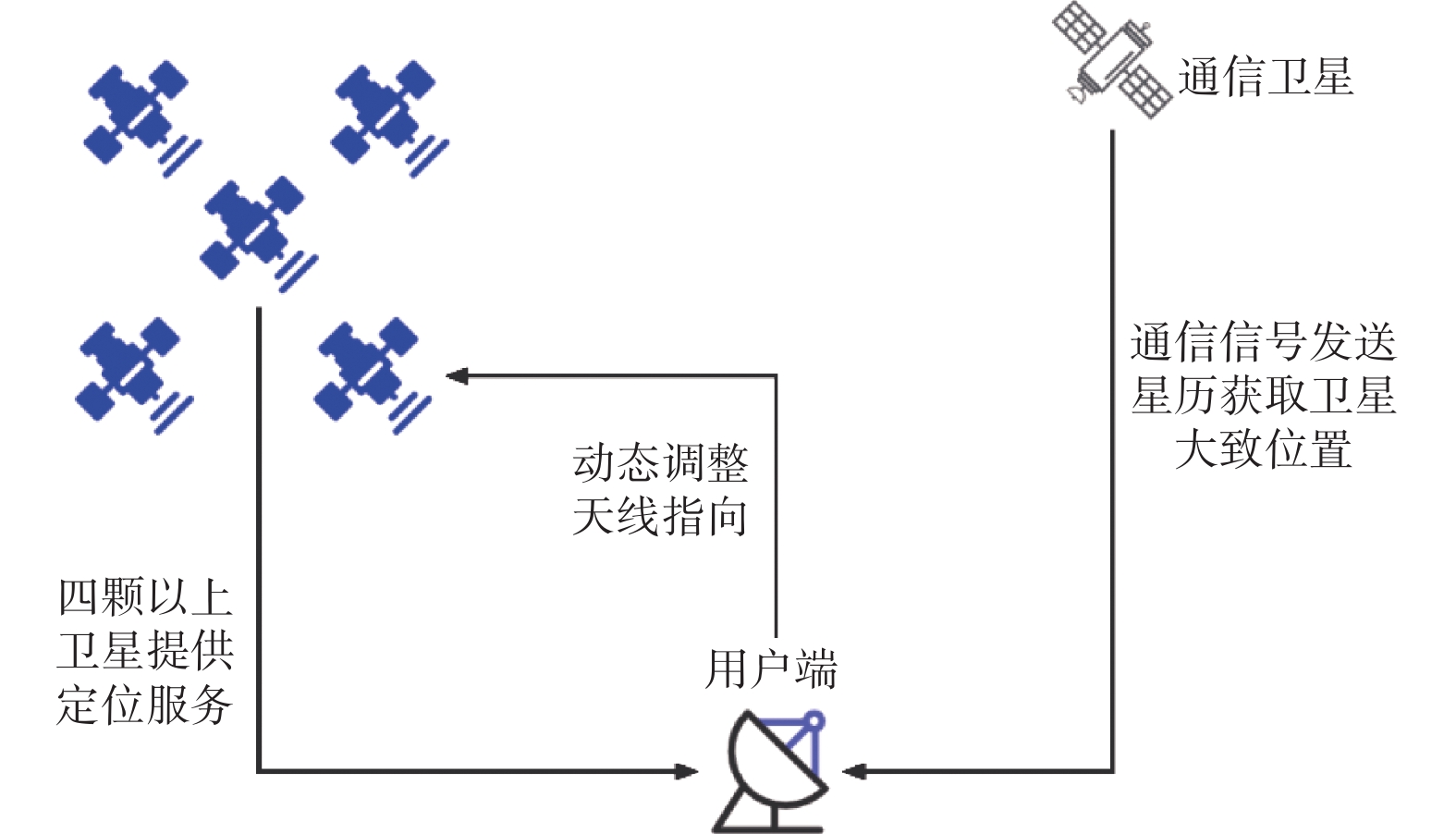
Ka频段实际应用中面临的另一个关键的挑战,那就是在用户端如何高效、稳定地接收信号。为了确保稳定的通信和定位性能,用户端必须能够同时接收到四颗以上的卫星信号,如图8所示。
![]() 图 8 通导融合体制下用户端天线动态调整Figure 8. Dynamic adjustment of user side antenna under conduction fusion system
图 8 通导融合体制下用户端天线动态调整Figure 8. Dynamic adjustment of user side antenna under conduction fusion system要实现这一目标,需要对天线的设计进行专门化的优化,包括天线的形状、尺寸、材料选择以及指向机制等多个方面。通过精确计算和设计,我们可以确保天线在接收到Ka频段信号时,能够最大化地提升信号强度和稳定性。
然而,仅仅依赖天线的优化设计是不够的。在实际应用中,由于各种因素的影响,如天气、地形、建筑物等,天线的指向可能会发生变化,导致信号接收的不稳定。为了解决这个问题,我们可以采取通导融合的体制,利用通信信号来获取卫星的星历信息。星历信息描述了卫星在太空中的位置和轨迹。通过获取这些信息,可以大致了解卫星的位置,从而为用户端提供精确的天线指向建议。这样,即使在外部环境发生变化时,用户端也能够根据这些信息对天线指向进行动态调整,确保始终能够接收到至少四颗卫星的信号,无论用户处于何种环境和使用场景,都能够获得稳定、高质量的Ka频段信号接收性能。
5. 结论
随着需求的进步和大规模低轨卫星星座的兴起,全球卫星导航系统正在迎来一场从传统的L频段向更具优势的Ka频段发展的技术革新;这一变革不仅为解决当前GNSS系统和低轨导航增强的定位精度瓶颈提供新的契机,同时预示着实时高精度定位技术的未来发展方向。
本文的主要创新点有:首先,针对Ka低轨导航增强领域的研究空白,仿真分析了Ka频段在低轨导航领域的潜在性能优势;其次,对Ka频段的实时高精度定位性能进行了分析计算,给出了具体的数值结果。这些数据显示,Ka频段在实时高精度定位方面具有显著优势,有望实现码基单历元高精度定位。最后,针对目前Ka频段在导航领域存在的问题和解决方案进行讨论,为后续研究奠定基础。
本文仿真结果表明,基于Ka频段进行导航增强的预计定位精度可达到
0.0475 m,有望突破目前GNSS系统和低轨导航增强的定位精度瓶颈,为用户提供更为可靠和准确的定位数据,从而极大地提高其在城市、峡谷等挑战性环境下的可用性,未来有望在全球范围内提供秒级收敛的厘米级实时高精度定位服务。 -
![]()
图 2 Ka频段和L频段天线增益对比
Figure 2. Comparison of antenna gain between Ka frequency band and L frequency band
![]()
图 3 Ka频段和L频段码跟踪精度对比
Figure 3. Comparison of codes tracking accuracy between Ka frequency band and L frequency band
![]()
图 4 Ka频段和L频段电离层误差对比
Figure 4. Comparison of ionospheric errors between Ka frequency band and L frequency band
![]()
图 6 MEO卫星和LEO卫星覆盖性能差异
Figure 6. Differences in coverage performance between MEO and LEO satellites
![]()
图 8 通导融合体制下用户端天线动态调整
Figure 8. Dynamic adjustment of user side antenna under conduction fusion system
表 1 高精度定位信号信息速率与落地功率
Table 1 High precision positioning signal information rate and landing power
信号 频率/MHz 信息速率/(bit/s) 落地功率/dBW Galileo E6B 1278.75 448 −158.25 QZSS L6D 1278.75 2000 −159.82 BDS B2b 1207.14 500 −160  下载: 导出CSV
下载: 导出CSV
表 2 国内外低轨高精度增强领域进行的系统规划和试验星建设情况
Table 2 System planning and experimental satellite construction in the field of high-precision enhancement of low orbit at home and abroad
国家 低轨高精度增强
系统/试验星落地功率
/dBW信息速率
/(bit/s)频点/MHz 美国(XONA) Pulsar / / L,C 欧洲(ESA) LEO-PNT / / Ka 中国(未来导航) 微厘空间 −157 1000 L1: 1569 ~1581
L5:1170 ~1182 中国(武汉大学) 珞珈一号 约−130 / H1、H2 中国(电子科技) 天象一号 优于−163 1000 LePT1: 1525.21
LePT2:1298.187
下载: 导出CSV
表 3 Ka频段链路预算
Table 3 Link budget of Ka frequency band
Ka频段链路预算 中心频率 20.7 GHz 发射功率 13 dBW 轨道高度 1000 km地球半径 6371.393 km空间路径损耗 118.76 dB 仰角 15° 大气损耗 70.2 dB 极化损耗 3.01 dB 信号落地功率 −138.97 dBW
下载: 导出CSV
-
[1] REID T G R, CHAN B, GOEL A, et al. Satellite navigation for the age of autonomy[C]//IEEE. Proceedings of 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS). Portland, OR, USA: IEEE, 2020: 342-352.
[2] RIES L, ANGHILERI M, PRIETO-CERDEIRA R. FutureNAV LEO-PNT in-orbit demonstration and future system perspectives[R]. Vienna, Austria: European Space Agency, 2023.
[3] CHEN L, LV F, YANG Q, et al. Performance evaluation of centispace navigation augmentation experiment satellites[J]. Sensors, 2023, 23(12): 5704.
[4] 伍蔡伦, 孙腾达, 谢松. 天象一号卫星自主实时定轨方法与评估[J]. 无线电通信技术,2020,46(5):541-545. DOI: 10.3969/j.issn.1003-3114.2020.05.007 [5] 伍蔡伦, 树玉泉, 王刚, 等. 天象一号导航增强信号设计与性能评估[J]. 无线电工程,2020,50(9):748-753 DOI: 10.3969/j.issn.1003-3106.2020.09.007 [6] 王磊, 陈锐志, 李德仁, 等. 珞珈一号低轨卫星导航增强系统信号质量评估[J]. 武汉大学学报(信息科学版),2018,43(12):2191-2196. [7] DOVIS F. GNSS interference, threats, and countermeasures[M]. Boston: Artech, 2015.
[8] SCHMIDT D, RADKE K, CAMTEPE S, et al. A survey and analysis of the GNSS spoofing threat and countermeasures[J]. ACM Computing Surveys (CSUR),2016,48(4):64.
[9] HAIDER Z, KHALID S. Survey on effective GPS spoofing countermeasures[C]//IEEE. Proceedings of 2016 Sixth International Conference on Innovative Computing Technology. Dublin: IEEE, 2017: 573-577.
[10] MENG Y S, XIE J, LI X, et al. GNSS global PPP system technology: bottleneck and development direction[M]//YANG C F, XIE J. China Satellite Navigation Conference (CSNC 2024) Proceedings. Singapore: Springer, 2023: 263-279.
[11] DANESHMAND S, JAHROMI A J, BROUMANDAN A, et al. GNSS space-time interference mitigation and attitude determination in the presence of interference signals[J]. Sensors,2015,15(6):12180-12204. DOI: 10.3390/s150612180
[12] REID T, NEISH A, WALTER T, et al. Satellite navigation from low earth orbit[C]//SLAC National Accelerator Lab. Proceedings of SCPNT Symposium. Menlo Park: SLAC National Accelerator Lab, 2016.
[13] REID T G R, NEISH A M, WALTER T F, et al. Leveraging commercial broadband LEO constellations for navigating[C]//Oregon Convention Center. Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016). Portland: Oregon Convention Center, 2016: 2300-2314.
[14] REID T G R, WALTER T, ENGE P K, et al. Navigation from low earth orbit: part 1: concept, current capability, and future promise[J]. Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications, 2020, 2: 1359-1379.
[15] REID T G R, NEISH A M, WALTER T, et al. Broadband LEO constellations for navigation[J]. Navigation,2018,65(2):205-220. DOI: 10.1002/navi.234
[16] IANNUCCI P A, HUMPHREYS T E. Economical fused LEO GNSS[C]//IEEE. Proceedings of 2020 IEEE/ION Position, Location and Navigation Symposium. Portland: IEEE, 2020: 426-443.
[17] KHALIFE J, NEINAVAIE M, KASSAS Z M. The first carrier phase tracking and positioning results with Starlink LEO satellite signals[J]. IEEE Transactions on Aerospace and Electronic Systems,2022,58(2):1487-1491. DOI: 10.1109/TAES.2021.3113880

计量
- 文章访问数: 0
- HTML全文浏览量: 0
- PDF下载量: 0

